Svařování s Kobotem
Svařování s kolaborativním robotem je v současnosti jednou z nejvíce používaných aplikací v našem sortimentu.




Hlavní výhodou tohoto řešení, je velmi jednoduchá integrace do současného prostředí malých a středních firem, a to z důvodu snadného a zároveň rychlého zaškolení, které je maximálně v rozsahu několika dnů (1-3), a velmi rychlého programování za pomocí ručního vedení robota.
Nutno podotknout, že zde je programátorem samotný svářeč, nebo „pomocná“ osoba. Nutností je alespoň základní znalost obsluhy mobilního telefonu, nebo „tabletu“ s dotykovou obrazovkou.
Samozřejmě jako při každém použití opakovaných procesů výroby, i zde je nutná příprava dílů pro opakovatelnou výrobu, … i když robot Doosan může sloužit rovněž pro kusovou výrobu, stejně tak jako pro sériovou, čemuž velmi napomáhá integrovaný svařovací interface pro zmíněné snadné programování a inteligentní zpětné vazby mezi programem, svářečkou a robotem.
Rovněž ovládací a programová tlačítka umístěná na šestém kloubu robota velmi napomáhají rychlosti a „lehkosti“ intuitivního programování.
- Jsme připraveni vám zodpovědět vaše dotazy a rovněž tak předvést robota se svářečkou u vás v závodě na vašich dílech, nebo v našem showroomu.
- Roboty, svářečky od EWM, či příslušenství máme skladem v ČR.
Vhodnost „kobota“ pro svařování
- Rychlost programování a “přeprogramování” robota
- Možnost snadného přesunu robota
- Kolizní bezpečnost – z pohledu robota a nástroje
- Snazší splnění bezpečnostních standardů
- Možnost obsluhy běžným personálem (není nutnost programátora)
- Porovnatelná rychlost s prům.robotem (rozhoduje technol. rychlost svařování)
Snadné vedení robota (hořáku) na svařovací body za pomocí“ Cockpitu”
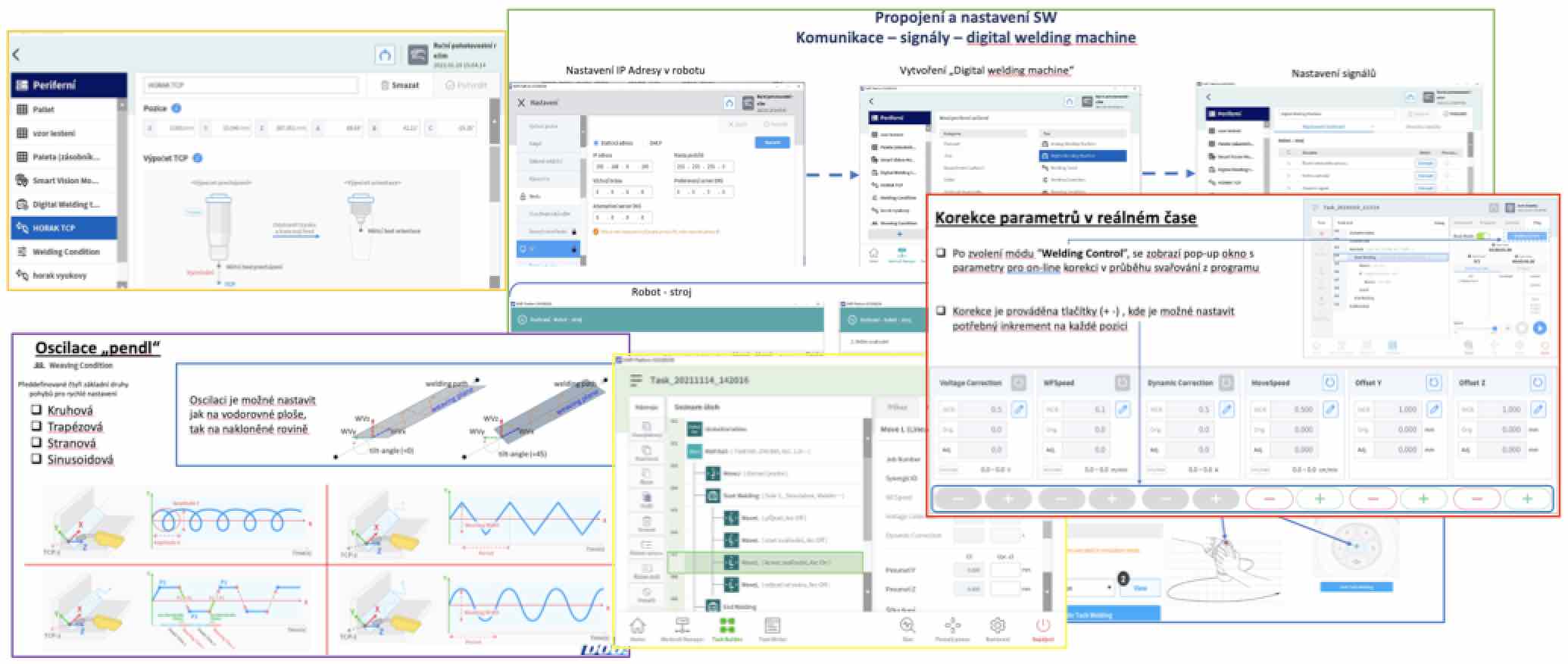
Snadné programování za pomoci integrovaného uživatelského prostředí – INTUITIVNÍHO PROSTŘEDÍ
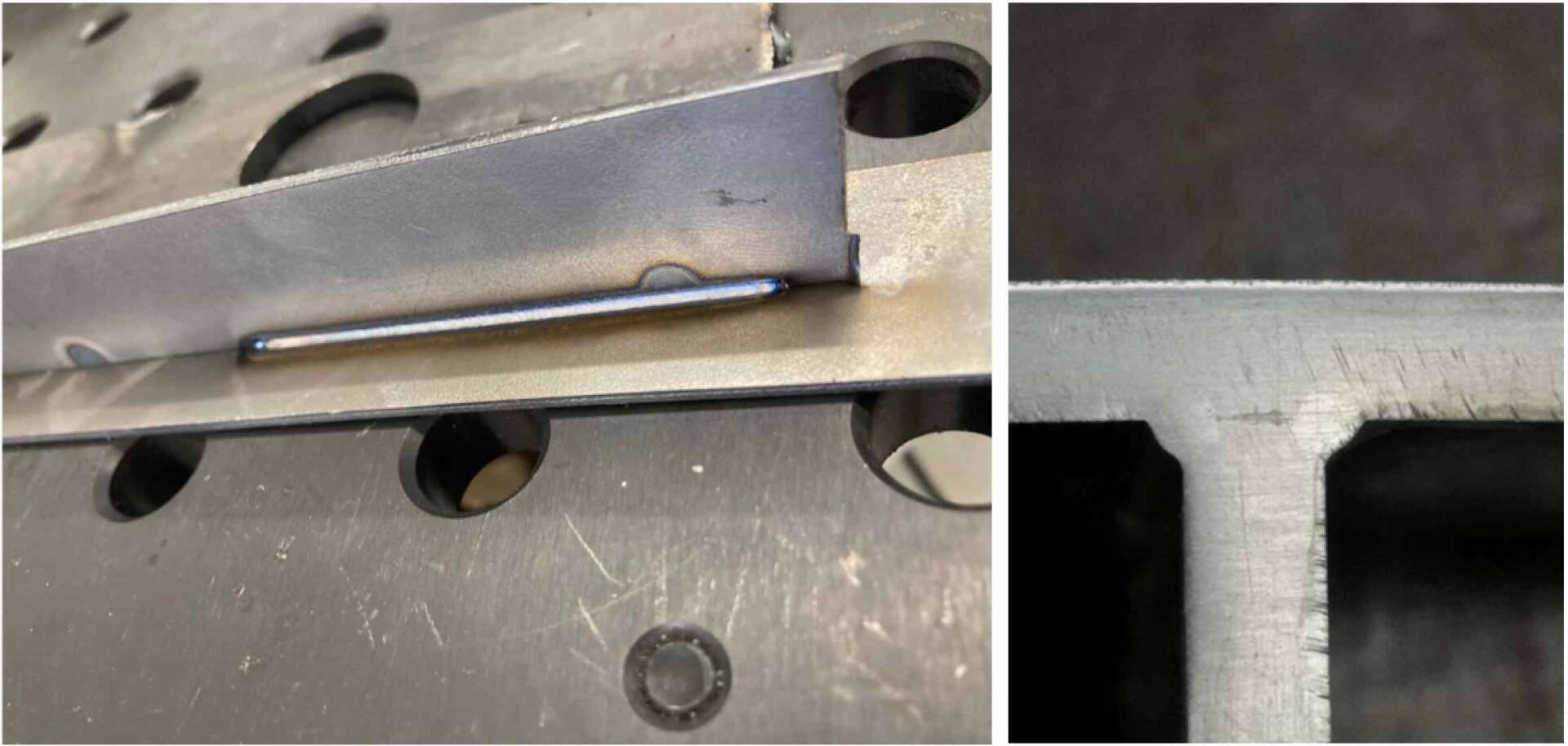
Díly „zaručeně“ vhodné pro svařování kobotem
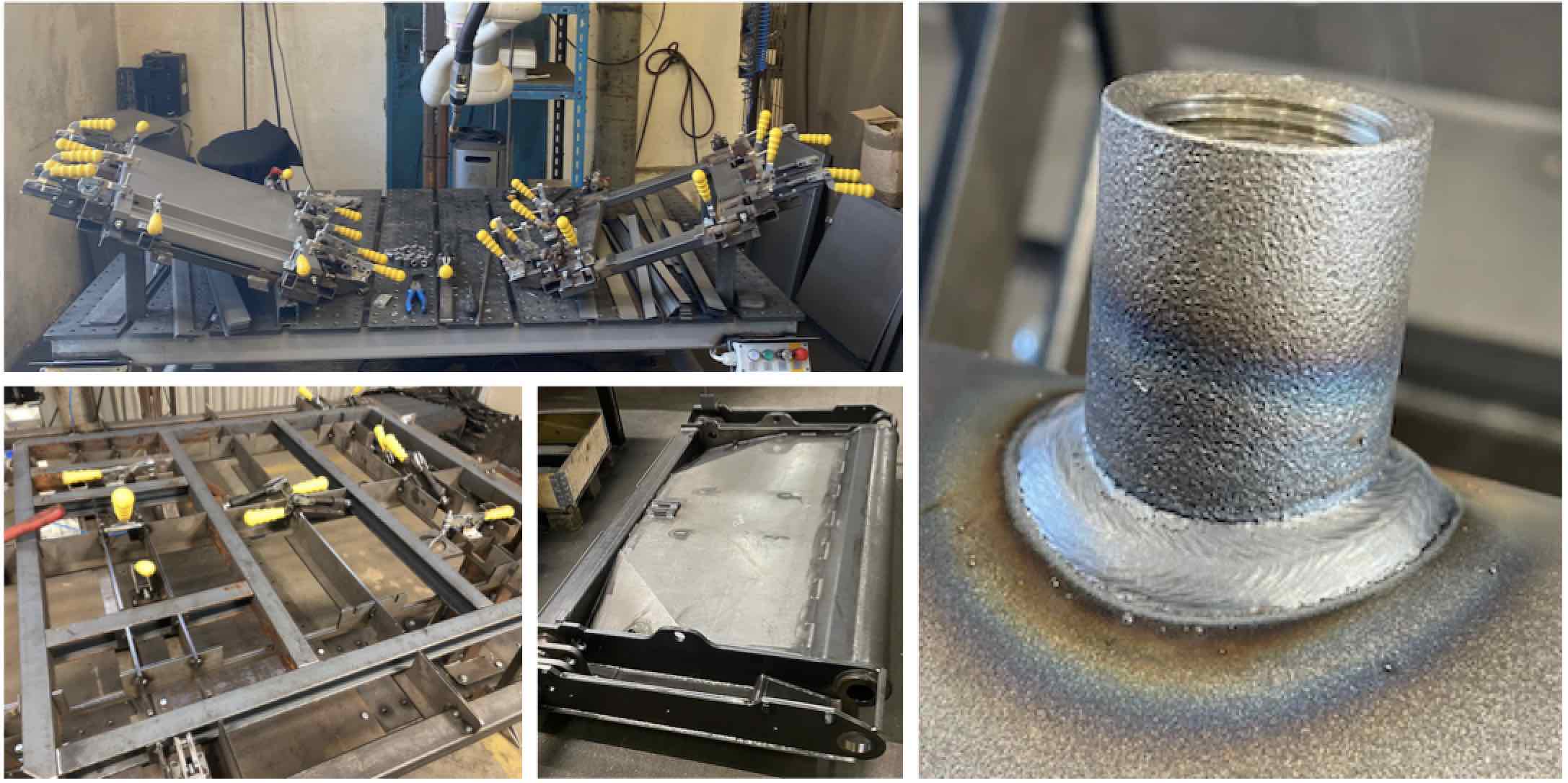
Díly vhodné pro svařování kobotem
„TIG + drát“ svařování kobotem
„Laser“ svařování kobotem
Pozice robota vhodné pro svařování a jejich specifika
Na stole
nejvíce používané s optimálním dosahem v radiusu robota
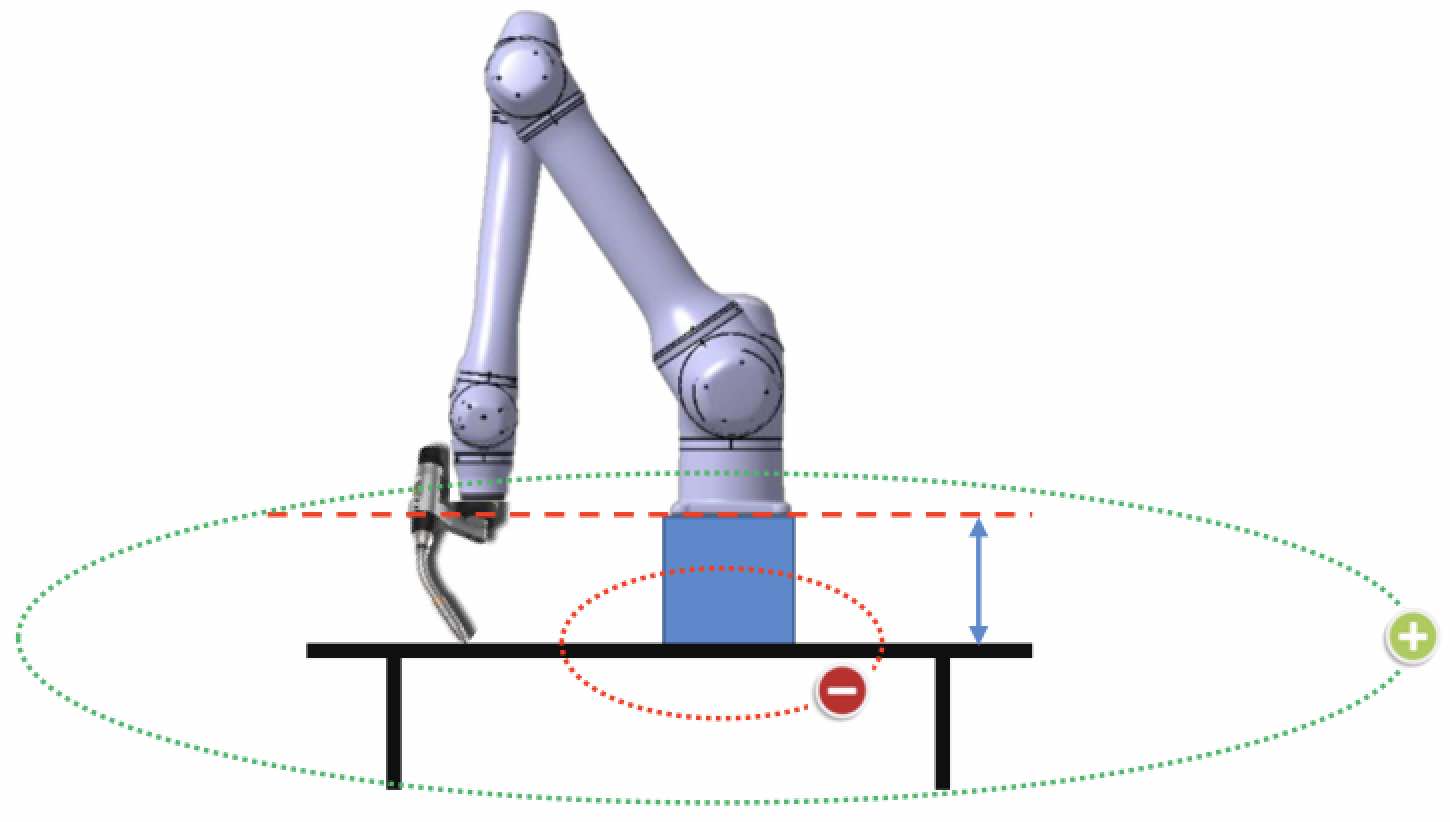
Ideální výška robota nad pracovním stolem rovna TCP hořáku od přiruby
Větší obvodový dosah
“Mrtvá” zóna v místě paty robota, či stojanu
Na stropě
hlavou dolů
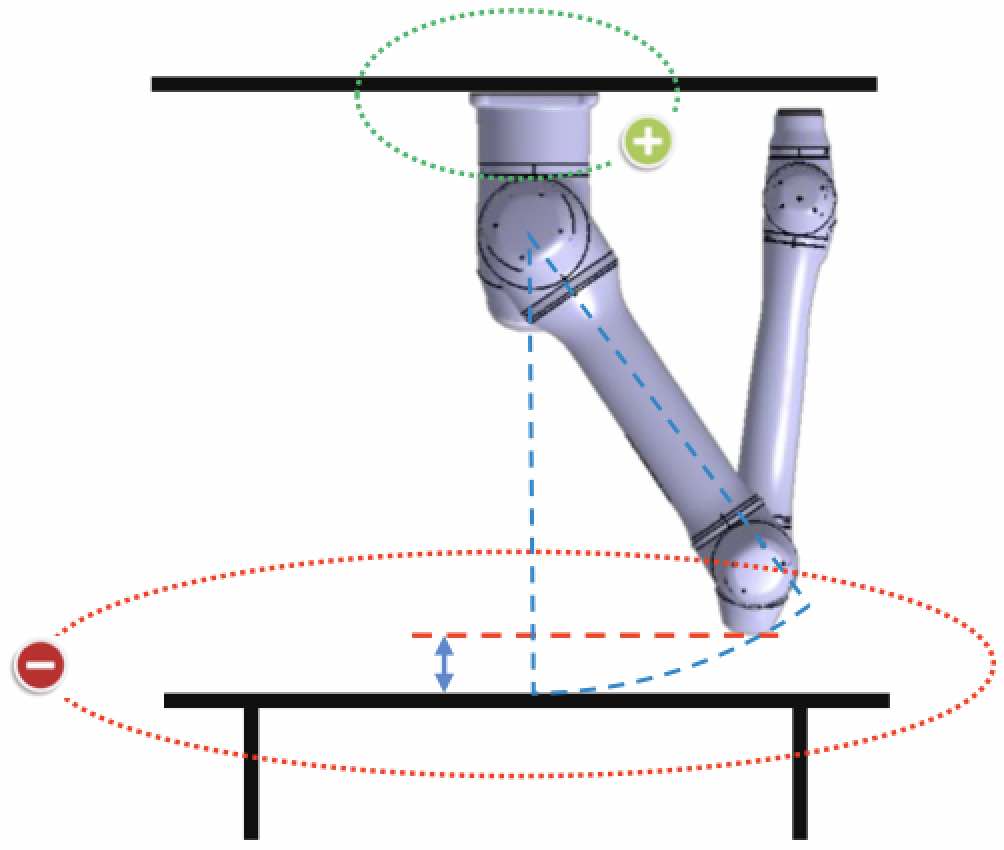
Nutno kalkulovat potřebnou výšku instalace, s ohledem na průchodnost ramena ve třetí ose – vůči pracovní desce a instalovanému svařenci s přípravky, případně limitu úhlu na tomtéž kloubu
Nepřekáží pata robota
Menší obvodový dosah
Vyvážení kabelového svazku hořáku
Stabilita robota při jeho ručním navádění závisí na:
- Zvolené hmotnosti koncového zařízení
- Zvoleném těžišti koncového zařízení
- Konstantního odporu (vyvážení a těžiště v závislosti na pohybu robota v prostoru
- Hořák s držákem hořáku – konstatní těžiště a hmotnost
- Kabelový svazek – konstantní hmotnost, ale proměnné těžiště v závislosti na poloze svazku
Pro co možná nejlepší vyvážení robota v závislosti na poloze (natočení) os je důležité:
- Použít balancer o správně zvolené síle tahu
- Správně umístěné podpůrné vedené pro co možné nejmenší omezení dosahu

Bezpečnost
Tradiční průmyslový robot
Vždy za oplocením či senzory.
Spolupracující robot
Za „optimálních“ podmínek bez oplocení a externích senzorů.

Je svařování bezpečná „kolaborativní aplikace“?
NENÍ, a to z následujících důvodů:
- Svařovací oblouk – extrémní žár a světelný tok
- Malý průřez drátu (katody) – nebezpečí mechanického poranění
Možné řešení bezpečnosti v závislosti na analýze rizik
Níže zmíněné může fungovat samostatně, nebo použitím kombinací zmíněného a to rovněž v závislosti na „uznání“ zbytkových rizik, ale ve většině případů postačuje kukla + UV zástěny (hlavně díky možnosti robotů Doosan v oblasti nastavení limitů).
Svařovací kukla se „samo“zatmavovacím průzorem

- Ochrana proti oslnění
- Ochrana hlavy proti poranění
Oplocení s UV zástěnami
- Ochrana proti oslnění nezúčastněných osob
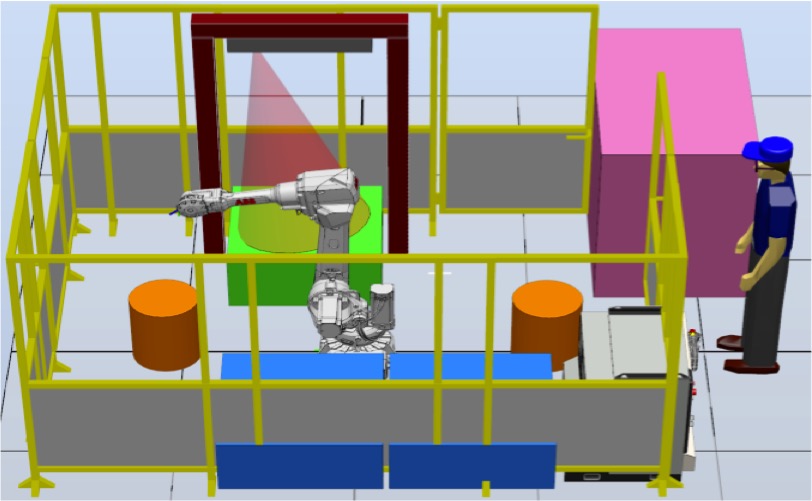
Světelné závory v prostoru vstupu

- Ochrana proti vstupu do pracoviště (kontrolovaná robotem)
Laserový skener

- Ochrana proti vstupu do pracoviště (kontrolovaná robotem)
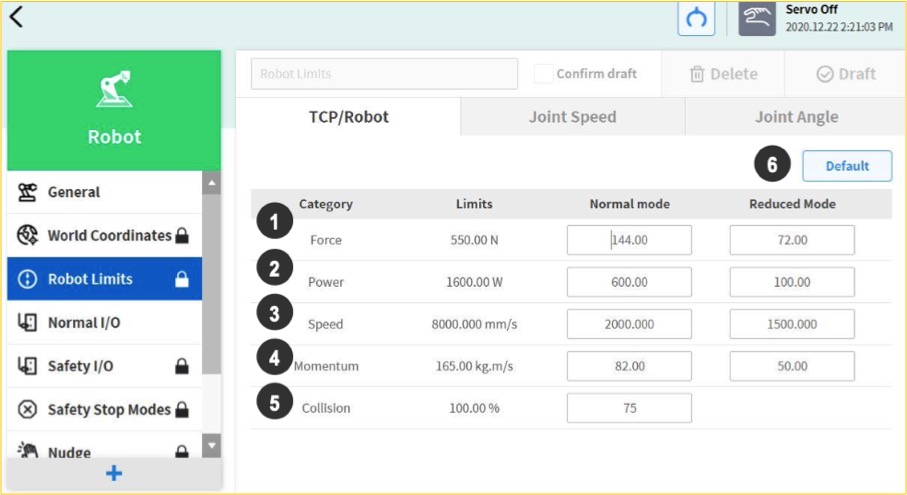
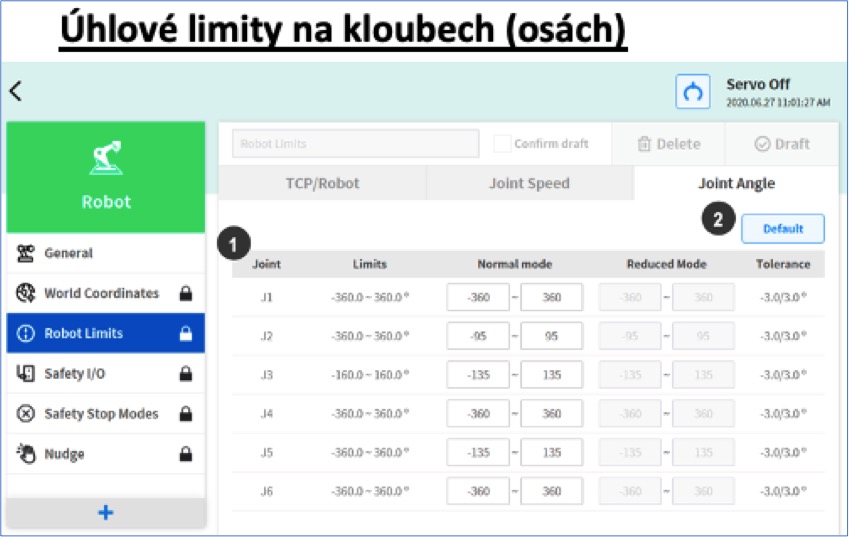
Limity Robota

Signalizace stavu robota pomocí led „pásku“

- Řada “M“ .. Na šesté ose
- Řada „A“ .. Na první ose
- Řada „H“ .. Na obou osách